역기전력
역기전력이란
역기전력(逆起電力, back-EMF, back-Electro Motive Force) (단위 : V)
단어로 유추하면 역방향으로 전기를 유발하는 힘,
영어로도 역방향의 전기를 유발하는 Force 이다.
그렇지만 단위는 전압의 단위인 V 이다.
단위에서 알 수 있듯이 역기전력은 전류와 역방향, 즉 전류를 방해하는 방향으로 발생하는 전압이다.
기호로는 e (순시값), E (실효값)로 표현한다.
플레밍의 왼손 법칙과 오른손 법칙
왼손 법칙 : 자기장 B 내에서 전류 I 가 흐르면 힘 F 가 발생한다.
(모터의 원리)
오른손 법칙 : 자기장 B 내에서 도체를 힘 F 방향으로 움직이면
전류 I 가 발생한다.
(발전기의 원리)
플레밍의 왼손 법칙과 오른손 법칙은 모터와 발전기에 따로 적용하는게 아니라 동시에 적용된다.
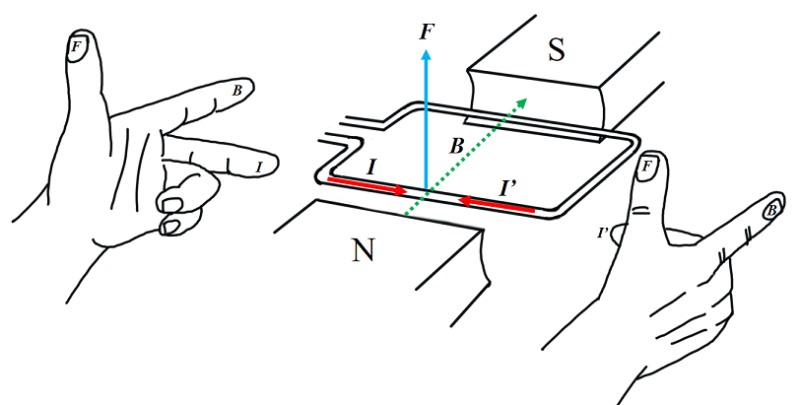
자기장 B 내에 놓여있는 도체에 전압을 인가하여 전류 I 를 흐르게 하면 그림처럼 힘 F 가 발생하여 회전을 시작한다.
(왼손 법칙)
그런데, 자기장 B 내에서 도체가 힘 F 방향으로 움직이기 시작했기 때문에 처음 전류 I 와는 반대 방향으로 전류 I' 가 발생한다.
(오른손 법칙)
처음 전류 I 를 방해하는 I' 를 흐르게 하는 전압이 역기전력이다.
(가끔 역기전압이라고도 하는 사람이 있는데, 정식 용어는 아니지만 더 맞는 표현일지도 모르겠다)
즉, 모터는 모터이면서 발전기이다. 모터와 발전기가 동시에 작동하는 것이다.
그래서 모터를 에너지 변환 장치라고 표현하는데,
전기 에너지를 일로 변환하면 모터, 역으로 일을 전기 에너지로 변환하면 발전기가 된다.
발전기에서는 역기전력이 바로 발전되는 전압(유기전압)이다.
역기전력의 영향
모터의 입장에서 단자 전압이 인가되고 전류가 흐르면 토크가 발생하여 회전을 시작한다.
바로 이 회전에 의해서 역기전력이 발생하는데 회전속도에 비례해서 역기전력이 증가하기 때문에
속도가 증가하다 보면 단자 전압과 역기전력이 거의 같아져서 전류를 흘릴 수 있는 전압이 부족하게 된다.
이때 전류가 흐르지 않으면 토크도 발생하지 않으므로 속도가 더 이상 증가할 수 없게 된다.

이 방정식의 양 변에 전류 i를 곱한다.
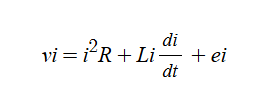
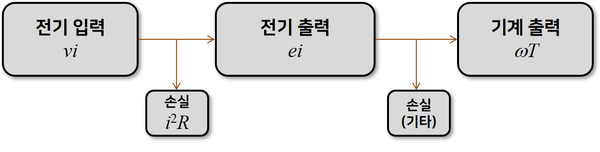
vi : 전기 입력(W)
i2R : 저항 손실(W)
Li (di/dt) : 인덕턴스에 의한 무효 전력
ei : 기계 출력(W)으로 변환되기 전의 전기 출력(W)
전기 출력에서 기계 손실, 철손, 부가부하손을 빼면
기계 출력이 되는데, 남은 손실을 무시한다면,
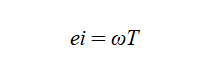
위 공식이 성립한다.
즉, 역기전력과 전류의 곱에 의해서 기계 출력으로 변환된다.
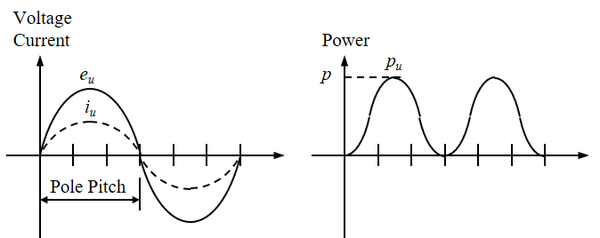
그림처럼 역기전력 e 와 전류 i 의 파형이 완벽한 정현파인 경우, 출력 p 는 sin2 함수로 변환된다.
전체적으로 출력이 꿀렁꿀렁 거리고, 어떤 지점에서는 출력이 '0'인 곳도 있다.
※참고 : 단상 및 2상 교류 모터는 출력이 0인 지점이 있기 때문에스스로 기동을 못할 수가 있다.
3상 이상이 되어야 스스로 기동이 가능하다.
그래서 교류 전기 모터에서는 흔들림 없는 출력을 내기 위해 3상 이상을 사용한다.
(엔진에서 부드러운 출력을 내기 위해 실린더수를 증가시키는 것과 같다.)

전기적으로 120도씩 위상차가 나는 U, V, W 상 역기전력에 동일한 위상의 3상 전류를 공급해주면각 상의 출력은 sin2 함수 형태로 변환되지만 3상을 다 합치면 완벽하게 일정한 출력이 나오게 된다.
그러나 실제로는 역기전력이 완벽한 정현파가 아니고, 공급하는 전류 또한 완벽한 정현파가 아니며,
또 역기전력과 전류가 완벽하게 위상이 같지 않기 때문에 출력의 흔들림과 저하가 나타난다.
이것을 최소화 하는 것이 바로 모터 설계, 제작 기술과 인버터 제어 기술이다.
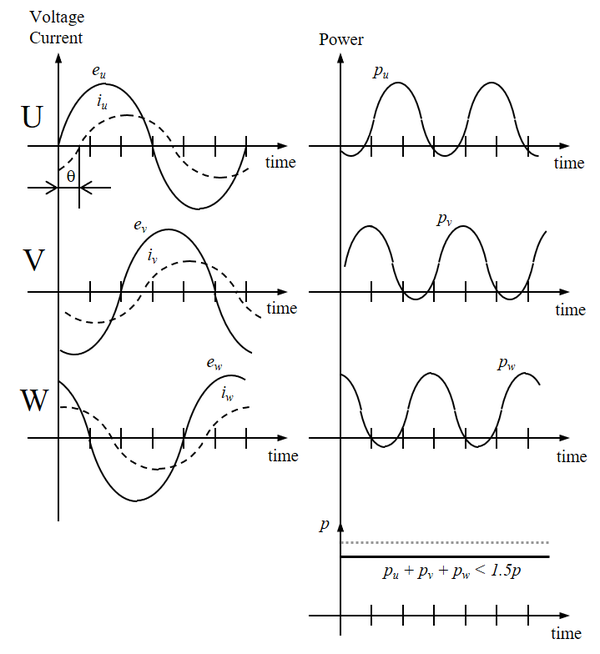
위 그림은 역기전력과 전류의 위상이 어긋났을 때 출력의 변화를 보여준다.
U상만 본다면 역기전력과 전류의 위상차 때문에 출력이 마이너스가 되는 지점이 나타난다.
나머지 V, W상도 마찬가지이므로 전체 출력은 저하된다.
만약에 위상차가 전기적으로 90도가 된다면?
U상만 생각해보면 (+)출력과 (-)출력이 반복적으로 나타나게 되므로 실제 출력은 '0'이 된다.
즉, 입력은 투입되는데 좌우로 흔들리기만 하고 출력은 나오지 않는 상태이다.
그러므로 무엇보다 역기전력과 전류의 위상을 동일하게 맞춰주는 것이 중요하다.
그래서 역기전력의 위상을 검출하여 인버터 전류를 제어하기 위한 센서가 바로 홀(Hall) 센서, 레졸버 또는 절대치 엔코더 등이다.
따라서 센서 설치를 잘못 했다든지, 센서에 문제가 있다든지, U, V, W 상 순서를 잘못 연결했다든지,
인버터 설정에서 위상차를 잘못 입력하면 모터의 출력은 감소하게 된다.
최악의 경우에는 의도치 않는 (+)피드백에 의해서 모터가 폭주하거나,
부족한 출력을 더 내기 위해 전류가 과도하게 투입되어 소손되는 경우도 있다.