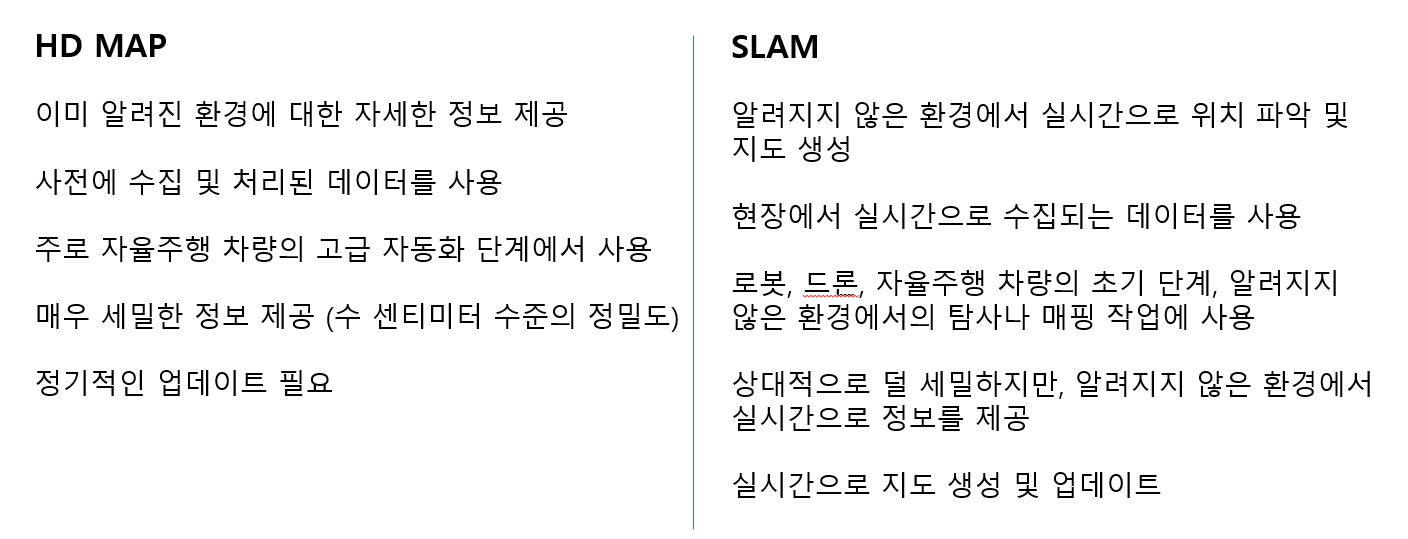
HD MAP (High-Definition Map)

HD Map은 자율 주행을 위해 특별히 제작된 고정밀 지도로, 이를 일반적으로 고정밀 지도 또는 HD Map이라고 부릅니다.
이 지도는 로봇이 3D 공간에서 직접 운전할 때 필요한 매우 상세한 정보를 제공합니다.
사람처럼 실시간 의사결정 능력을 갖춘 로봇에게는, 차량을 올바른 장소에서 정지시키거나, 교차로에서 교통 신호를 확인하거나, 도로에서 급작스러운 장애물을 피하는 등의 선택이 필요합니다.
이러한 선택은 사람에게는 상대적으로 쉬울 수 있지만, 로봇에게는 복잡하고 어려운 과제입니다. 따라서 HD Map에서 제공하는 상세한 매핑 정보는 로봇이 안전하게 주행하는 데 큰 도움을 줍니다.
고정밀 GPS
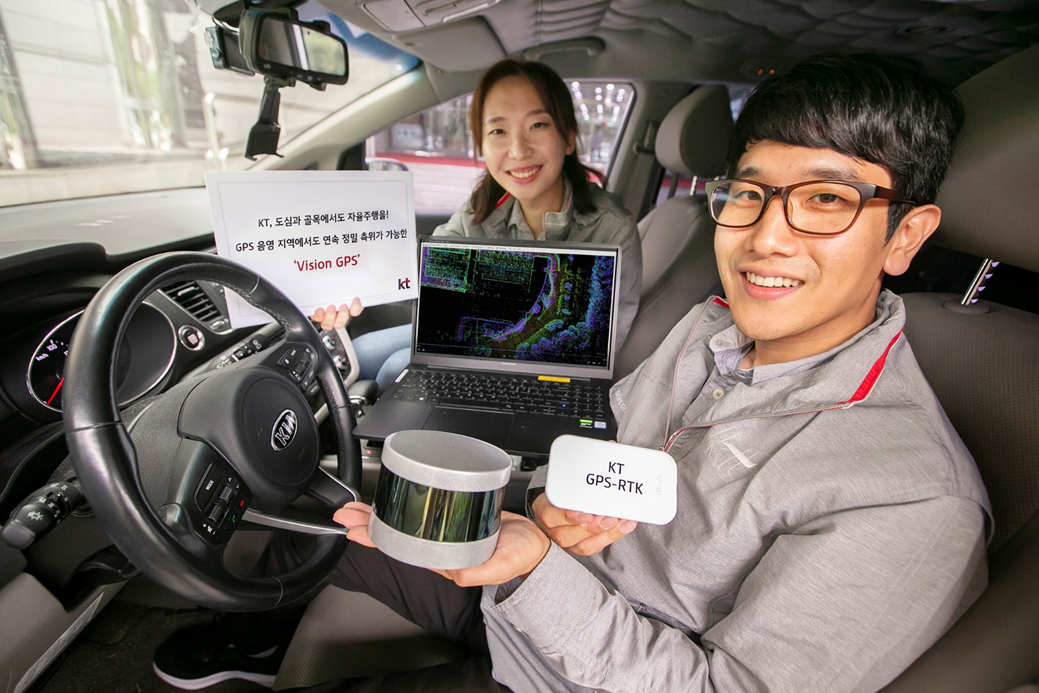
그러나, 로봇이 HD Map만을 사용하여 주행하는 것은 아닙니다.
차량의 정확한 위치 정보를 알기 위해서는 고정밀 GPS의 도움이 필요합니다. 일반적인 GPS는 차량이 몇 번째 차선에서 주행하고 있는지 등의 상세한 정보를 제공하지 못하지만, 고정밀 GPS는 1cm 이내의 오차로 차량의 정확한 위치를 추정할 수 있습니다. 이렇게 추정된 위치 정보는 HD Map와 결합되어, 차량이 현재 어느 지점을 주행하고 있는지를 정확히 알려줍니다.
이러한 이유로 많은 회사들이 HD Map과 고정밀 GPS 기술의 연구 및 개발에 주력하고 있습니다. GPS 위치측정의 정확성을 떨어뜨리는 요소들은 크게 3부분으로 나눌 수 있습니다. 첫째 구조적 요인으로 생기는 오차로는 인공위성 시간 오차, 인공위성 위치 오차, 전리층과 대류층의 굴절, 잡음, 다중 경로 등이 있습니다. 두번째로는 위성의 배치상황에 따른 기하학적 오차가 있으며 마지막으로 가장 큰 오차 원인인 Selective Availability 가 있습니다.
이 요소들이 모두 잠재적으로 합쳐져서 매우 큰 오차 결과를 낳는데 이것을 User Equivalent Range Error라고 합니다. 각 오차들은 시간과 장소에 따라서 매우 크게 변합니다.
고정밀 GPS는 정밀도를 높이기 위하여 여러가지 기술을 사용합니다.
다중 주파수

첫번째는 다중 주파수입니다. 고정밀 GPS 장치는 여러 GPS 주파수 대역을 동시에 수신할 수 있습니다. 이를 통해 대기 중의 이온층에 의한 신호 지연을 보정하며, 정확도를 높입니다.
Real-Time Kinematic

두번째는 RTK (Real-Time Kinematic)입니다. RTK는 두 개의 GPS 수신기를 사용하는 기술입니다.
하나는 이동하지 않는 기준점(기지국)으로, 정확한 위치가 알려져 있습니다.
다른 하나는 이동하는 수신기(예: 드론 또는 차량)입니다.
기지국에서 수신된 신호와 이동 수신기에서 수신된 신호 간의 차이를 계산하여 매우 높은 정밀도의 위치 정보를 제공합니다.
DGPS

세번째는 오차 보정입니다.
고정밀 GPS는 대기, 위성의 궤도 오차, 수신기 오차 등 다양한 오차 원인을 실시간으로 보정합니다.
특히, DGPS(Differential GPS)와 같은 기술을 사용하여 기지국에서 수집된 오차 정보를 이용해 이동하는 수신기의 위치 오차를 보정합니다.
위성데이터
네번째는 보다 많은 위성 데이터를 사용하는 방법입니다.
고정밀 GPS 장치는 GPS뿐만 아니라 여러 위성 네비게이션 시스템의 데이터를 동시에 사용할 수 있습니다. 이를 통해 더 많은 위성 신호를 수신하여 정밀도를 향상시킵니다.
HERE

HD Map의 선두 업체는 네덜란드에 본사를 둔 디지털 지도 업체 Here입니다.
Google Map 또는 Apple Map에 익숙한 스마트폰 사용자들에게 낯선 이름일 수 있는데, 유럽과 미국 자동차 내비게이션 시장에서는 점유율이 70%가 넘는 절대 강자입니다.
Here가 현재까지 구축한 데이터는 도로 길이로 4천3백만km이며 서비스를 제공하고 있는 나라가 196개국에 달하고 있어 HD map 시장을 선점 하고자 하는 기업들간에 Here를 두고 인수전이 일어나기도 했습니다.
SLAM (Simultaneous Localization And Mapping)
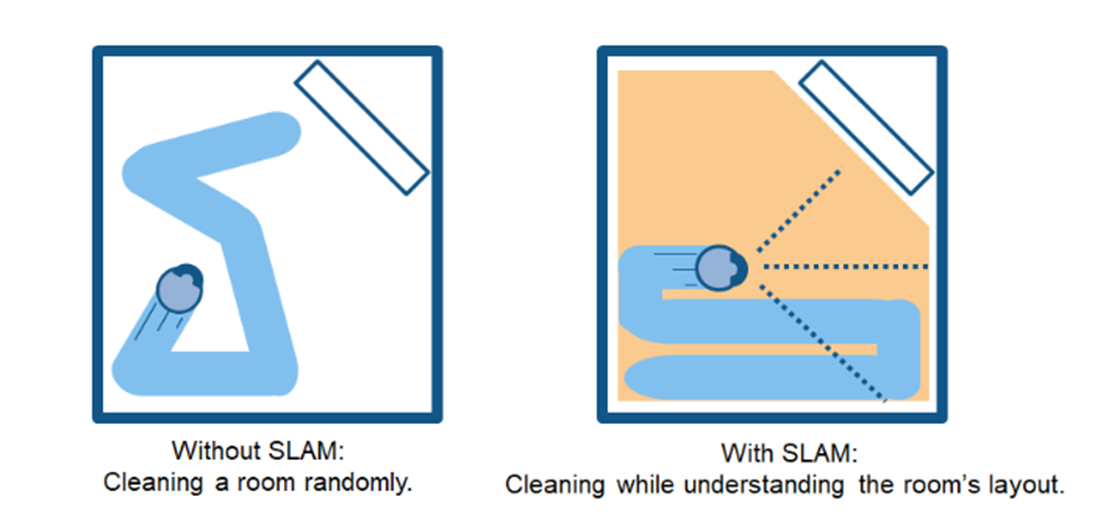
SLAM(동시적 위치추정 및 지도작성)은 자율주행 차량에 사용되어 주변 환경 지도를 작성하는 동시에 차량의 위치를 작성된 지도 안에서 추정하는 방법입니다.
쉬운 예로 로봇청소기가 있습니다. SLAM이 없다면 로봇 청소기는 방 안에서 무작위로 돌아다니기만 하고 바닥을 전부 청소하지도 못할 수 있습니다. 그리고 이런 방식으로는 전력이 과도하게 사용되어 배터리가 금방 소진됩니다.
반면 SLAM 기술이 탑재된 로봇은 바퀴 회전수와 카메라 및 기타 영상 센서에서 가져온 데이터 같은 정보를 사용하여 필요한 움직임의 양을 파악할 수 있습니다. 이를 위치추정이라고 합니다.
또한 로봇은 카메라와 기타 센서를 동시에 사용하여 주변 환경의 장애물 지도를 생성하고 같은 구역을 또다시 청소하는 경우를 방지할 수 있습니다. 이를 지도작성이라고 합니다.
또한 창고에서 선반을 정렬하는 이동 로봇의 길 찾기, 자율주행 차량의 빈 주차 공간 주차하기 또는 미지의 환경에서의 드론 조종을 통한 배송 등 다른 여러 응용 사례에서도 유용하게 사용할 수 있습니다.
Black Swan

하지만, 자율주행자동차에 다양한 첨단 센서 기능을 장착한다고 하더라도 한계가 존재합니다.
높은 언덕을 넘거나 안개가 짙은 환경에서는 센서와 카메라를 통해 주변 정보 획득에 한계가 있습니다.
즉, 더 나은 자율주행을 위해서는 주변의 정보를 센서와 카메라가 아닌 통신을 통해 환경 정보를 전송받음으로서 돌발상황에 대처할 수 있습니다.
이런 돌발상황에 대한 테스트를 진행할때 ‘블랙스완’이라는 용어가 나옵니다.
"블랙 스완"이란 예측하지 못한 희귀한 사건을 의미하는 용어입니다. 이 용어는 주로 금융 분야에서 큰 영향을 미치는 예측하지 못한 사건들을 설명하기 위해 사용되곤 합니다.
자율주행에서의 블랙 스완은 다음과 같은 의미를 갖습니다:
블랙 스완 사건은 자율 주행 시스템의 안전성을 크게 위협할 수 있기 때문에, 이러한 사건을 예방하거나 대응하는 방법을 연구하는 것은 매우 중요합니다.
시뮬레이션 테스트, 실제 도로 테스트, 연속적인 업데이트와 개선을 통해 자율 주행 시스템의 안전성을 높이는 것이 필요합니다.
이러한 블랙스완 사건들을 받아와서 클러스터링하여 문제점 보완에 사용이 됩니다.
V2X

그림과 같이 차세대 지능형교통체계에 대한 연구개발 방향은 차량주행 중 도로-자동차-운전자 및 보행자 간 연결을 통해 차량이 주행하면서 유기적으로 상호 통신하며 교통정보를 교환하거나 공유하는 형태로 연구되고 있습니다.

이와 같이 차량과 차량 사이의 통신은 물론 차량과 사물 간의 통신을 하는 기술을 총칭하여 V2X 라고 합니다.
V2X 통신 기술 이란? 차량이 유·무선망을 통해 다른 차량 및 도로 등 인프라가 구축된 사물과 정보를 교환하는 것
또는 그 기술을 뜻하는 것으로

V2V(Vehicle to Vehicle), V2I(Vehicle to Infrastructure), V2N(Vehicle to Nomadic Device), V2P(Vehicle to Pedestrian페더스트리안) 등을 총칭합니다.
V2X 기술은 유럽, 북미, 일본, 한국 등 텔레매틱스/ ITS(Intelligent Transport Systems) 기술 개발에 참여하는 주요국에서 오랜 기간 다양한 연구를 통해 기술에 대한 실효성 검증을 수행하고 있습니다.
특히, 최근에는 LTE, WiFi 와 같은 통신 서비스의 확대에 따라 차량과 다양한 스마트기기를 연결하여 차량 안에서 다양한 부가 서비스를 제공하기 위한 V2N 기술 개발까지 활발하게 진행되고 있습니다.
정리
'자동차' 카테고리의 다른 글
| SILS, HILS (0) | 2024.01.05 |
|---|---|
| A SPICE (심화) (4) | 2023.11.01 |
| SAE J3016 (0) | 2023.10.18 |
| ASPICE (8) | 2023.09.06 |
| CAN과 CAN FD (0) | 2023.09.04 |