SAE J3016
자율주행은 크게 두가지 방식이 있는데, 교통 수단 내에 운행하는 사람이 없고, 외부에 있는 서버와 통신하며 서버의 명령에 따라 주행하는 무인 운전 방식과, 교통수단 내부에 탑재된 인공지능 컴퓨터가 스스로 판단하여 주행하는 방식으로 나눌 수 있습니다. 전자는 주로 철도차량에 많이 쓰이는 방식이고, 후자는 자동차에 많이 쓰이는 방식입니다.
나중에 자율주행이 본격적으로 시행되면 예를 들어서 스스로 판단하여 주행하되 서버에서 보내는 정보와 명령도 따르는 방식처럼, 두가지가 혼합될 가능성이 높습니다.
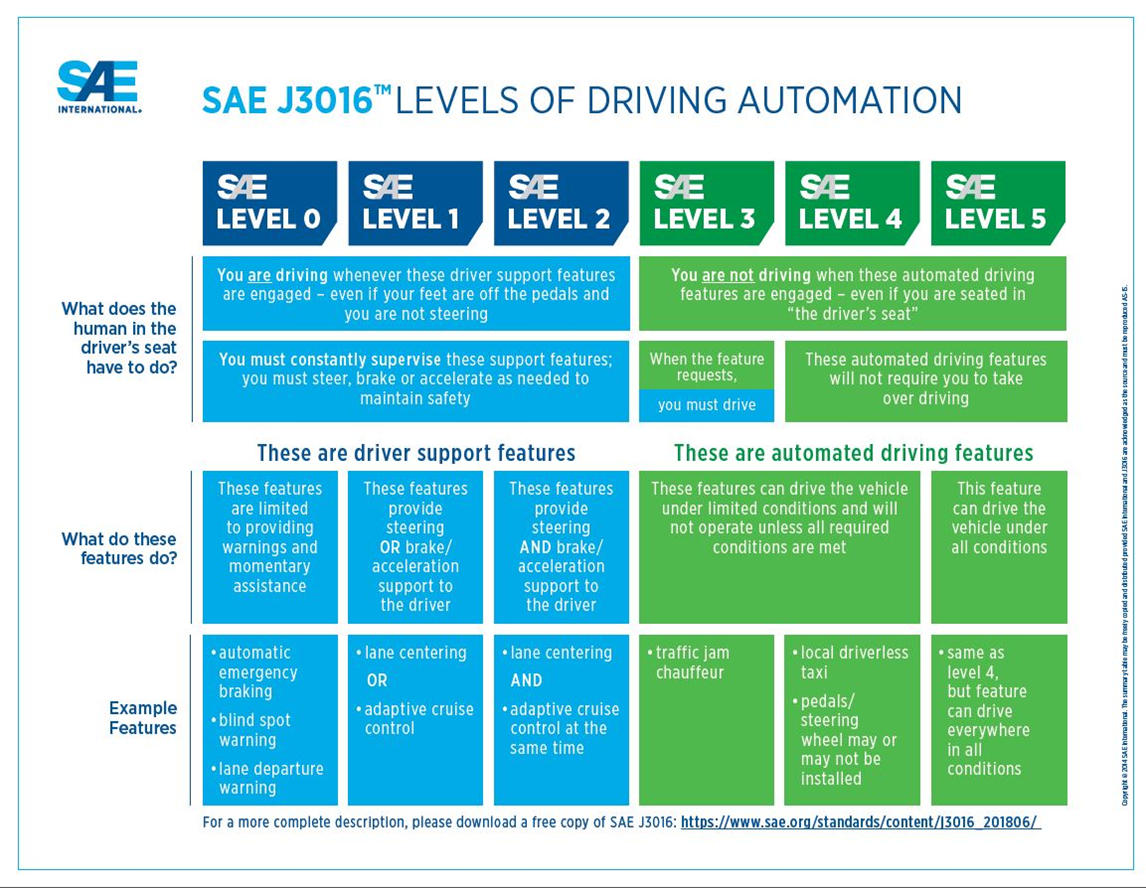
오늘은 자동차의 자율주행에 대해 이야기해보겠습니다. 자동차 자율주행은 총 5단계가 있는데, 도로상에서 운행되는 자동차의 운전 자동화 시스템에 관한 용어 및 분류 체계에 대한 표준이 있습니다. SAE J3016은 미국 자동차 공학회에서 개발되었으며, 자율주행 자동차의 다양한 레벨을 정의하는데 사용되는 주요 참조 문서입니다. SAE J3016는 자동차의 자동화 레벨을 0부터 5까지 총 6단계로 분류하고 있습니다.
들어가기에 앞서, 자율주행차는 영어로 Autonomous vehicle, Automated vehicle, Self-driving vehicle 이 세가지 표현이 가장 많이 혼용되고 있습니다. 자율주행차를 나타내는 가장 적합한 표현은 무엇일까요? 일단, SAE J3016에는 다음과 같이 이야기하고 있습니다.
"Autonomous라는 말은, '독자적 결정능력 및 권한'을 뜻하기 때문에 자율주행 차량이 모든 기능을 스스로 수행하지 않고 통신이나 외부에 의존하게 된다면 이는 Autonomous가 아니라 Automated에 가까움. 따라서, 이 문서에서는 Autonomous란 표현을 쓰지 않을 것"
만약 완벽한 AI를 통해 차량이 스스로 모든 것을 관찰, 생각, 판단, 행동할 수 있다면 Autonomous vehicle이라고 할 수 있겠지만 현재까지는 이는 이상적인 개념이기 때문에 Automated vehicle이 맞다는 지적입니다. 하지만, 실제로 그 어느 누구도 (심지어 정부 기관 및 업계에서도) 이 둘을 구별하여 쓰고 있지 않습니다. 그 동안의 리서치 결과로는 Autonomous vehicle이라는 단어가 가장 많이 사용되고 있으며 어디에서도 이 세 용어의 정확한 정의 구분을 제공해 주고 있진 않습니다. 따라서, 자율주행차를 이야기할 때, Autonomous vehicle이라는 말이 가장 적합하다고 생각하며, Self-driving이란 말은 사용하기 가장 조심스러운 표현입니다.
자율주행에 여러 단계를 부여하거나 분류를 하는 이유는 무엇일까요?
첫번째는 기술 개발 측면에서 이정표를 제시하는 효과가 있습니다. 미국 자동차 공학회가 제시한 SAE J3016의 기준은 자율주행차의 분류 기준이 아니라 운전자동화의 단계 구분임을 명확히 밝히고 있습니다. 즉, 자율주행기능 개발을 위한 여러 개념을 정의하고 이를 통한 기술적 체계를 잡기 위한 분류입니다. SAE J3016은 단계만 제시한 것이 아니라 동적운전임무, 운행설계영역, 자동운전체계 또는 자율주행시스템, 사물-사건탐지및 대응, 전략.전술.운행 기능 등 자율주행에 대한 핵심적인 개념들을 제시하고 있습니다. 이러한 개념 정의를 통해 자율주행을 공학적으로 접근하여 분류할 수 있는 틀을 잡았고, 세계 여러나라들이 준용하고 있습니다.
SAE J3016이 제시하는 운전자동화 여섯단계는 ‘차량’의 분류기준이 아니고 표출되는 ‘기능’의 분류기준입니다. 따라서 동일한 차량이 레벨3으로 운행되거나 레벨2로 운행되거나 레벨0으로도 운행이 될 수 있습니다. 즉, 차가 스스로 생각하느냐 마느냐 같은 자율에 방점을 둔 것이 아니라, 얼마나 기능이 자동적으로 이루어지는지가 핵심입니다.
ODD, DDT, OEDR

이 그림의 안쪽 회색 부분은 차량 시스템의 내부 동작을 표현한 것입니다.
그 중 안쪽 붉은색 점선박스는 차량의 횡방향 제어, 예를 들어 차선 유지, 차선 변경 등과 관련된 동작이며, 종방향 제어는, 예를 들어 가속, 감속, 차량 간격 유지 등과 관련된 동작입니다. 즉 그림에서 종방향/횡방향 제어가 동시에 가능한 Level2의 주요 기능입니다. 여기서 차량의 동작 중 OEDR이라는 개념이 등장하는데, 차량의 횡방향/종방향 주행 시, 예를 들어 전방 차량의 급감속, 갑작스러운 끼어듦, 예상하지 못한 공사구간 출현 시 이러한 이벤트 상황을 감지하고 속도를 줄이거나, 공사구간을 판단하여 주행 여부를 결정 및 판단하는 영역입니다. 이러한 OEDR과 횡방향 제어 동작이 합쳐지면서, Level 3로 발전합니다. 이러한 횡방향 제어, 종방향 제어, OEDR 등의 유기적으로 움직이고 동작하는 것을 DDT라고 합니다. 즉 차량이 고속도로 상황에서 어댑티브 크루즈 컨트롤 상황에서 차선을 유지하고, 앞에 발생한 적절한 이벤트들에 반응하여 동작하는 차량의 거동 및 동작에 관련된 부분을 DDT라고 합니다.
이 그림은 DDT에 대한 구조도로, 자동차의 주행에 필요한 여러 기능들이 어떻게 연결되어 작동하는지를 나타냅니다.
전략적 기능은 목적지와 경유지 계획, 그리고 경로 및 목적지 시간과 선택에 관한 것입니다. 다시 말해, 우리가 어디로 갈 것인지, 어떤 경로를 선택할 것인지에 대한 계획을 담당하는 부분입니다.
운영적 기능은 OEDR, 즉 Object and Event Detection and Response로, 주행 중 발생하는 다양한 이벤트나 객체를 감지하고 그에 따른 반응을 취하는 기능을 담당합니다. 또한, 차량의 움직임을 제어하는 기본 차량 운동 제어 기능과, 사건 또는 객체 회피 및 급행 경로 따르기를 위한 계획 및 실행 기능도 포함됩니다.
전술적 기능은 차량의 횡방향 운동 제어와 종방향 운동 제어를 포함합니다.
마지막으로, 이 모든 기능들은 차량의 움직임을 제어하기 위해 연결됩니다.
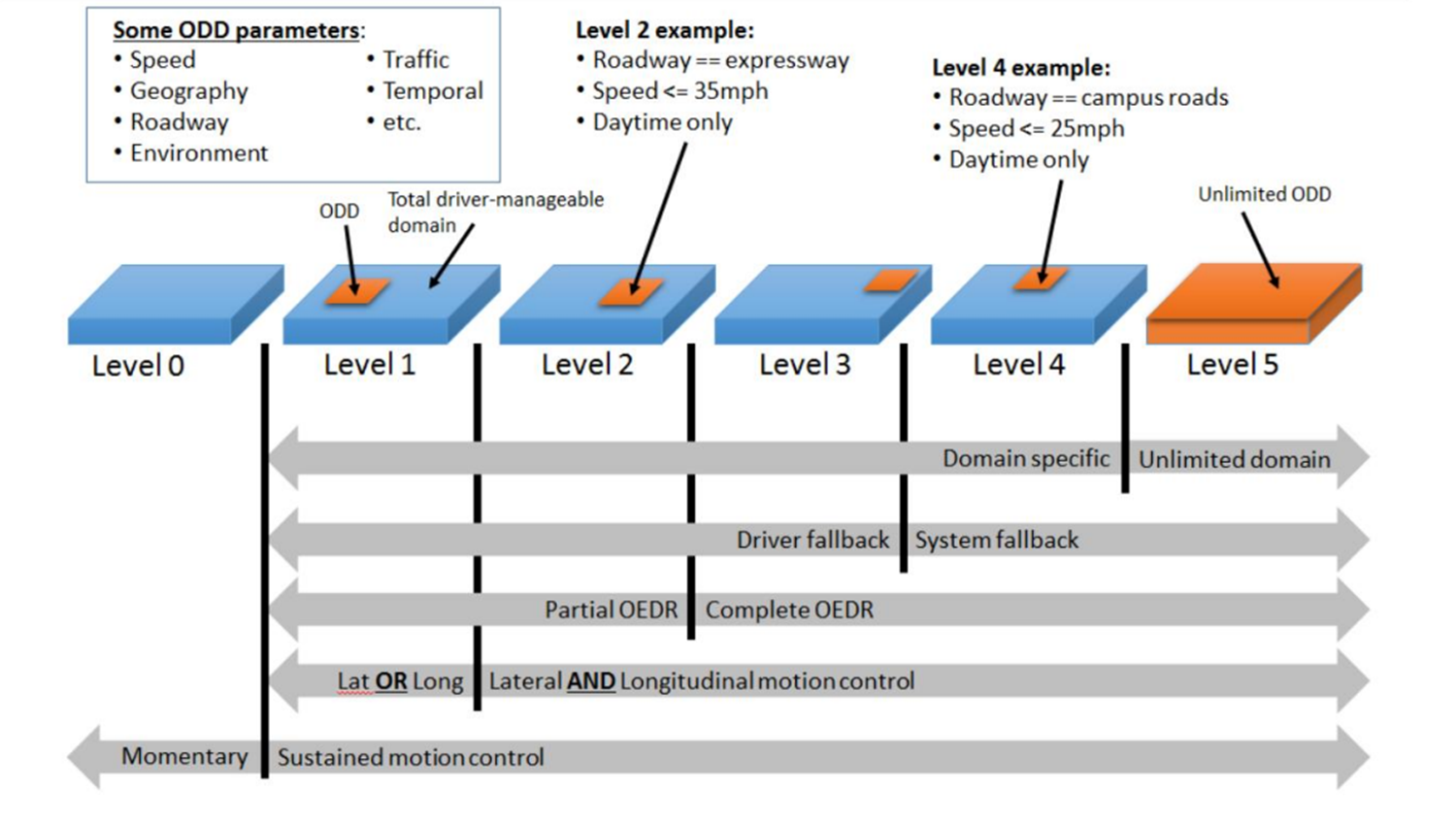
마지막으로 가장 중요한 개념인 ODD입니다. 자율주행차가 주행하고자 하는 시간, 구간, 영역 등을 의미합니다.
예를들어 고속도로에서의 드라이빙 보조시스템인 HDA는 ODD가 고속도로가 될 수 있습니다. 또한 낮, 밤, 새벽, 저녁과 같이 시간이나, 맑은날, 흐린날, 눈오는날, 비오는날, 안개 많은 날 같은 날씨도 포함합니다.
자율 주행 운행 조건을 무슨무슨 고속도로에서 속도는 100km 이하 주간에만 주행하도록 제한 한다면, 이 조건 외에는 시스템이 동작하지 않습니다.
DDT Fallback
자율주행 레벨 분류
LEVEL 0

첫번째로 레벨 제로입니다. 운전자가 모든 운전 작업을 수행합니다.
자동화 시스템은 지속적으로 운전 작업을 수행하지는 않습니다. 단, 다른 차량 시스템은 경고나 임시 비상 개입을 제공할 수 있습니다.
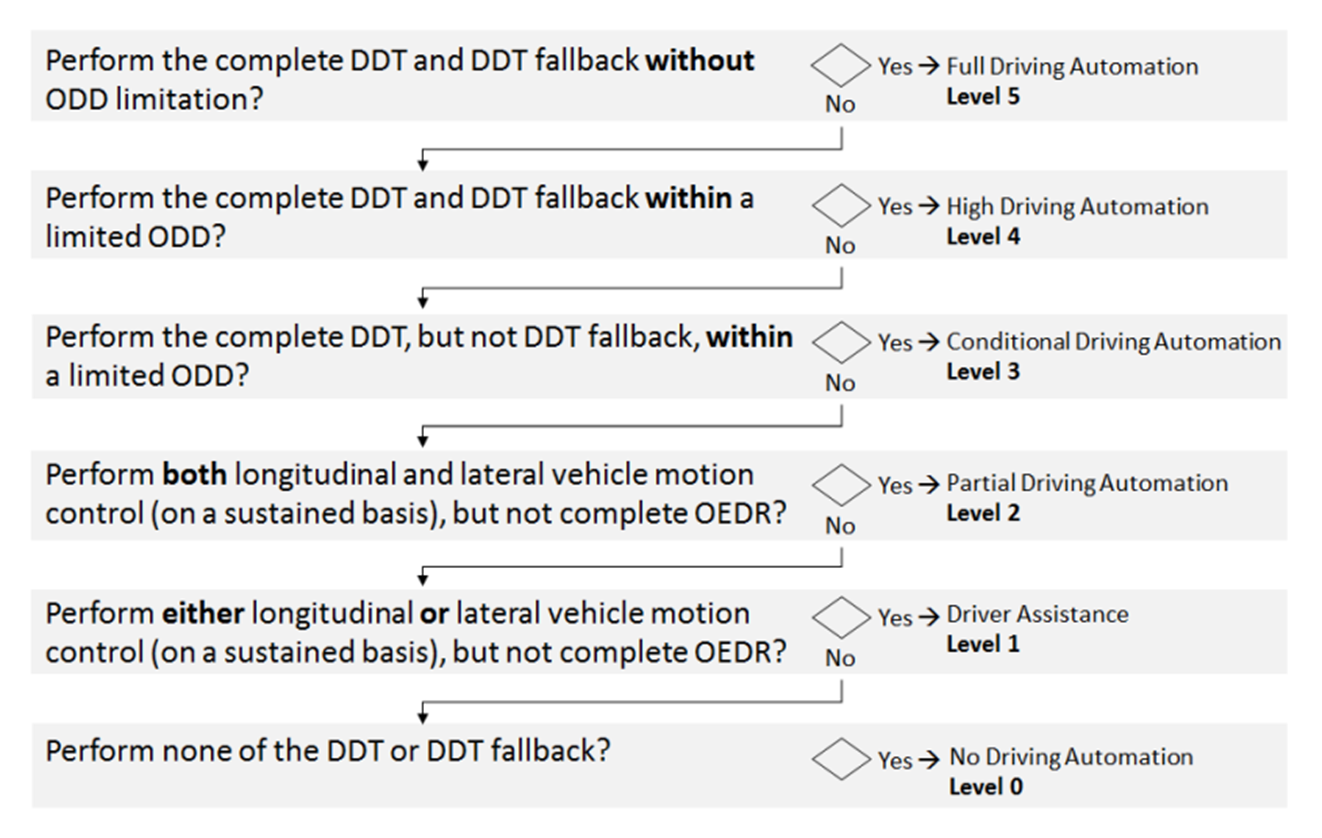
즉, 아무런 DDT나 DDT fallback을 못한다라는 말로, 0단계로서, 운전자동화 기능이 없는 상태입니다.
LEVEL1

운전자가 운전 자동화 시스템이 수행하지 않는 운전 작업의 나머지 부분을 수행하고, 시스템 감독 및 필요한 경우 개입, 시스템의 활성화/비활성화 시점 결정, 필요하거나 원하는 경우 모든 운전작업을 즉시 수행합니다.
자동화 시스템은, 수직 또는 수평 차량 동작 제어 부분 작업을 수행하여 운전 작업을 일부 수행하고, 운전자의 요청에 따라 즉시 중단합니다.
즉, 가감속이나, 횡방향 제어 중 하나는 가능하나 사물, 사건 탐지 대응은 못 합니다. 따라서 1단계, 운전자 보조가 됩니다.
LEVEL2

레벨 2입니다.
장시간동안의 선형 및 측면 차량 움직임 제어는 가능하지만, 완전한 OEDR(Operational Environment Detection and Response)는 수행되지 않는다면, 이는 2단계, 부분 자율주행 단계에 해당됩니다.
LEVEL3

제한된 ODD 내에서 완전한 DDT를 수행할 수 있지만, DDT fallback은 수행하지 않는 경우, 이는 3단계, 조건부 자율주행 단계에 해당됩니다.
조금 더 자세히 내용을 뜯어보겠습니다.
LEVEL4

제한된 ODD 내에서 완전한 DDT와 DDT fallback을 수행할 수 있다면, 이는 4단계, 고도 자율주행 단계에 해당됩니다.
레벨 3와 달라진 점을 자세히 보겠습니다.
레벨 4부터는 차량의 자동화 수준이 높아져 대부분의 상황에서 인간의 개입 없이 자동 주행이 가능합니다. 하지만 특정 상황에서는 여전히 운전자의 개입이 필요할 수 있습니다.
레벨 4는 ADS가 작동 중일 때 DDT(동적 운전 과제) 또는 DDT fallback(비상 운전 모드)을 수행할 필요가 없습니다. 또한 차량이 어떻게 안전한 상태로 돌아갈 수 있을지 결정할 필요가 없습니다, ADS가 그것의 특정 작동 한계(즉 ODD 리미트)에 도달한 후 DDT를 수행할 수도 있습니다. 필요한 경우 ADS의 작동을 중단하도록 요청할 수 있습니다. 마지막으로 요청한 작동 중지 후에 운전자가 될 수 있습니다.
LEVEL5

만약 차량이 ODD 제한 없이 완전한 DDT와 DDT fallback을 수행할 수 있다면, 이는 5단계, 즉 완전 자율주행 단계에 해당됩니다.
레벨 4에서는, 자동차는 특정 조건에서 모든 운전 작업을 수행할 수 있습니다. 하지만 일부 상황에서 운전자의 개입이 필요할 수 있습니다.
하지만 레벨 5에서는, 이 레벨에서 자동차는 모든 도로 조건과 환경에서 모든 운전 작업을 수행할 수 있습니다. 운전자의 개입은 전혀 필요하지 않습니다.
레벨 4에서는 ADS가 활성화되지 않은 경우, 운전자는 운전 준비성을 확인하고 ADS를 활성화할지 결정해야 합니다.
하지만 레벨 5에서는 운전자는 운전 준비성만 확인하면 되며, 모든 도로 조건에서 ADS를 활성화할 수 있습니다.
레벨 4에서는 ADS는 정해진 운전 도메인 (ODD) 내에서만 작동합니다. ODD의 한계에 다다르면, 운전자에게 운전을 재개하도록 요청할 수 있습니다.
하지만 레벨 5에서는 ADS는 모든 도로 조건에서 작동할 수 있습니다. 특정한 운전 도메인 (ODD)에 제한되지 않습니다.

이 그림은 국내 관계법령상 자율주행차를 분류한 것입니다. 나름의 논리체계를 갖추고 있고, 일반인이 보기에는 그렇게 어렵지 않게 분류를 한 것 같지만 SAE J3016과 나란히 놓고 보면, 헷갈릴 소지가 있어 보였습니다.
SAE J3016 문서를 직역하면 Level 2가 부분 운전자동화인데 국내법상에는 정의가 없고, 조건부 운전 자동화라고 되어있는 Level 3가 부분자율주행자동차로 정의되어 있으며 Level 4 고도운전자동화는 조건부 완전 자율주행 자동차라고 되어 있는 듯 비슷한 용어가 다른 곳에 쓰이는 측면이 있어서 그렇게 느꼈습니다.
그리고 SAE J3016의 분류명 자체가 혼선의 소지가 있습니다. 레벨 2를 부분적 운전자동화라고 표현한 것 자체가 혼란을 야기할 요소가 있다고 보여졌습니다. 차라리 레벨 2를 첨단 운전자 보조기능 같은 표현으로 대체했다면 테슬라가 레벨 2 차량 가지고 FSD라고 선전하였을 때 일반 소비자의 혼선을 줄이는 데에도 좀 더 수월할 수 있었을 것이라고 생각했습니다. 저도 불과 얼마 전까지 테슬라의 자율주행이 레벨 3라고 알고 있었습니다.
레벨 4도 High Driving Automation이라고 한 것이 혼선의 소지가 있다고 생각합니다. 레벨 4 차량의 경우 실제로는 ODD가 매우 제한적인 나브샤 셔틀 같은 종류의 차량들이 포함되어 있습니다. 레벨 4는 상이한 접근방식의 다양한 차량들이 들어와 있기 때문에 기능적으로는 진보적이지 않으나 분류상 레벨 4인 차량도 포함되어 있어서 “고도"운전자동화 라는 표현은 상당한 오해를 불러올 수 있습니다.
SAE 문서에 관한 고찰
이러한 점들을 저희가 만약 SAE에 제기를 한다고 한다면, 지금까지의 미국 기관들을 상대해본 데이터에 비추어 볼 때, “법적인 것은 우리와 상관 없다, 이미 SAE J3016에 Legal Classification이 아니라고 표기하지 않았느냐, 한국이 한국법에 어떻게 정의하던 그것은 우리와 관련이 없다” 라고 할 것으로 예상됩니다. 그런 점을 생각하면 거꾸로 우리 법제도의 분류기준이 기왕이면 SAE와 매칭이 된다면 좋겠지만, 자기들 스스로 법적이기보다는 테크니컬한 분류기준이라고 명기한 SAE를 그대로 가져오지 않으면 안된다고도 생각됩니다. 그냥 좋은 참고서 정도로 생각하고, 공부하고, 국민들이 이해하기 쉽고, 사용하기 편한 제도를 만드는데 사용되면 되지 않을까 합니다.
'자동차' 카테고리의 다른 글
| A SPICE (심화) (4) | 2023.11.01 |
|---|---|
| HD MAP & SLAM (2) | 2023.10.18 |
| ASPICE (8) | 2023.09.06 |
| CAN과 CAN FD (0) | 2023.09.04 |
| ASIL (0) | 2023.09.04 |