728x90
차량용 통신 및 네트워크 개념
차량용 통신 개념
- 차량용 통신 : 차량 내 수십 개의 제어기들이 서로 안정적으로 정보를 공유하고 전달하기 위해 사용되는 유선 통식 방식
- 장점 : 신호선 단순화, 커넥터 소형화, 무게를 절감하면서 융합 제어가 가능하도록 한다.
차량용 네트워크의 개념
- 차량용 네트워크 : 다양한 방식으로 구성 가능하지만, 일반적으로 버스 구조를 가진다.
- 차량 내 개별 제어기의 역할에 따라 도메인 기준으로 그룹화하여 네트워크를 분리하는 것이 일반적이다.
차량용 통신 및 네트워크 도입 배경
차량용 통신 및 네트워크 도입 배경
- 최근 차량에는 수십개의 제어기가 탑재되며, 그 개수가 계속 늘어나는 추세이다.
- 차량 내 탑재되는 제어기가 늘어남에 따라, 신호선 연결만으로는 내부 신호 복잡도가 늘어나, 단순하고 안정적인 정보 공유를 위해 통신을 사용한다.
- 차량용 통신은 제어기의 특성이나 목적에 따라 요구 사항에 맞는 통신 프로토콜을 사용한다.
적용 현황
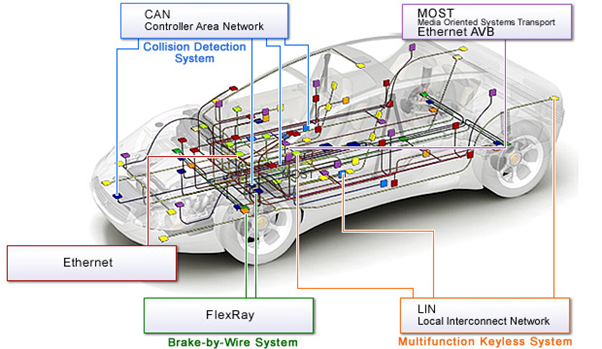
- CAN, LIN, Ethernet, FleRay와 같은 다양한 통신 프로토콜을 사용하는 다양한 네트워크들이 각각 존재하며, GateWay로 연결된다.
- 서로 다른 이종 통신으로 구성된 네트워크는 반드시 GateWay로 연결해 주어야 한다.
기존 신호선은 한번에 1bit 정보 통신
차량용 통신 종류 소개
차량용 내부 통신 종류
- 내부 통신은 제어기간 통신, 센서 통신, 멀티미디어 통신 등 다양한 요구 사항에 맞게 통신 방식을 결정한다.
- 제어기 간 통신에 주로 사용되는 방식은 CAN, LIN, FlexRay 등이 존재하며, 최근 고속 대용량 데이터에 대한 수요로 Ethernet 통신이 확대 적용 중이다.
차량용 외부 통신의 종류
- 외부 통신은 차량 간 통신, 차량과 인프라 통신, 차량과 디바이스 통신, 진단통신 , 전기차 통신등 다양한 통신 방식이 존재한다.
- V2X 통신에는 DSRC/WAVE 통신, 진단 통신에는 CAN, Ethernet, 전기차 충전에는 CAN, PLC 등이 사용된다
- 최근에는 LTE, 5G등 셀루러 데이터 통신을 차량에 적용한 커넥티느 카를 개발중이다.
CAN 통신 개념
CAN 통신의 도입 배경
- 기존 산업용으로 사용되던 통신 방식이 맞지 않아, 새로운 통신 개발
- CAN은 자동차 환경에 맞는 비용, 무게, 설계 용이성, 실시간성, 안정성 등을 고려한 통신 방식으로 Boshc와 OEM 주도로 최초 개발되었다.
- 최초 CAN 이후 저속 CAN(느리지만 한가닥으로 통신가능), CAN-FD(빠름)등 차량 내 제어 환경이나, 요구 사항이 변함에 따라 개선된 CAN 통신들도 개발중
CAN 통신 개념
- Multi-maset : 어떠한 제어기도 원하는 시점에 데이터 전송, 송신 가능
- Twisted-pair : CAN 통신은 Twisted-pair 형태의 꼬임선로를 이용하여 유선 통신을 함
- Bus topology : CAN 통신은 Bus Topology로, 네트워크가 구성되어 통신선을 서로 공유함에 따라 네트워크에 연결되는 제어기의 추가, 제거가 용이 하다.
CAN 통신 물리 계층
CAN 통신 물리 계층 구조
- 신호를 전달하는 매체의 구성을 포함하여, 비트 전송을 위한 전기적, 기계적, 기능적인 수단에 대한 내용을 담고 있는 계층 사양을 말한다.
- Twisted Wire를 이용하여 통신선을 공유하는 bus 형태로 네트워크를 구성한다.
- 통신 속도 설정을 통해 조절 가능하며 최대 1000, 보통 500kbps 를 사용한다.
- 통신 선로 상의 반사파 제거를 위해 bus 양 끝단에 120옴 에 해당하는 종단 저항을 배치
CAN 통신 물리 계층 동작 원리
- 차동 신호는 두 개의 전송선 위에 위상이 서로 반대로 흐르는 신호를 말하며, 두 신호의 전압 차이를 이용하여 비트 데이터를 전송한다.
- 차동 신호의 전압 차이를 이용하여 신호를 판별하기에 노이즈에 강한 특성을 가진다.
- 두 개의 통신선의 전압 차이를 이용해서 로직적으로 0,1을 판별, 0이면 Dominant bit, 1이면 recessive bit라 명명하여 둘이 충돌시 Dominant bit이 이긴다.
- Transceiver IC는 물리 계층의 동작 사양을 IC 형태로 구현한 것으로, 0,1전기 신호를 물리 신호로 전환하여 전달한다.
CAN 통신 데이터링크 계층
CAN 통신 데이터 링크 계층 구조
- 데이터 링크 계층은 데이터를 네트워크 전송 방식에 맞게 프레임화 해서 각 프레임의 형태 구성과 데이터 전달 과정의 오류 검출 등의 사양이 명시되어 있는 영역이다.
- CAN 통신 프레임은 디지털 데이터 전송 단위이며, 일반적으로 전송하는 데이터를 담을 수 있는 틀 형태로 규정된다.
- CAN 통신 프레임은 Arbitration 필드, Control 필드, Data 필드, CRC 필드, ACK 필드 등으로 구성된다.
CAN 통신 데이터링크 계층 동작 원리
- CAN 메시지 프레임 내의 Arbitration 필드에는 CAN Message ID 정보를 담을 수 있는 자리가 정해져 있다.
- CAN Message ID는 메시지를 구분하는 용도로 사용되며, 동시에 우선순위를 정해주기도 한다.
- 우선순위에 다라 중재라는 과정을 거쳐 순차적으로 동시 입력된 메시지 프레임을 처리한다.
LIN 통신 개념
LIN 통신 개념
- 저비용으로 구현할 수 있는 직렬 통신 방식으로 소형 센서 및 액추에이터 연결에 주로 활용한다.
- LIN 네트워크는 CAN 네트워크의 서브 넷으로 주로 사용한다.
- Single-wire 12V 버스를 이용하여 네트워크를 구성
- Single Master - Multiple Slaves 네트워크 구조를 가짐
- LIN 네트워크에 연결할 수 있는 쵀대 노드 수는 16개, 메시지 수는 64개 이하이다.
- 최대 통신 속도는 20kbps, ISO 17987 국제 표준에 정의되어 있다.
LIN 통신 동작 원리
- 한개의 마스터 노드와 여러개의 슬레이브 노드로 구성
- LIN 통신은 12V 베터리 전압을 이용한 전압 레벨 통식 방식을 이용하며 0V는 Dominant, 12V는 recessive를 의미한다.
- 슬레이브 제어기는 마스터의 요청에 맞게 응답 데이터 전송, 명령을 수행한다.
- 네트워크는 마스터에 의해 초기화 되며 이 마스터는 동기화 break, 동기화 byte, 메시지 ID로 구성된 헤더를 전송, 본인의 ID에 대해 수행하게 된다.
LIN 통신 활용
LIN 통신 제어기 구조
- MCU(Microcontroller) 와 LIN Transceiver로 구성
- MCU내 Serial Communication Interface(SCI) 통신 모듈은 범용적인 직렬 통신 인터페이스 중 하나이다.
- LIN 통신 제어기는 이러한 SCI 통신 모듈을 이용하고 외부 전송을 위한 신호 증폭을 Tranceiver IC가 수행한다.
- Single Wire 구조이고, MCU 내장 SCI 모듈을 사용하기에 소프트웨어적인 프로토콜 구현으로 저렴한 제어기와 네트워크 설계가 가능하다.
LIN 통신 활용 사례
- 운전대 멀티 펑션 스위치 : Cruise, 와이퍼, 오디어 제어 버튼
- 컴포트 장치 : 온도, 습도 선루프, 조명
- 엔진 : 소형 모터, 쿨링팬 모터
- 내-외장 장치 : 사이드 미러, 도어 윈도우, 시트 포지션 모터, 시트 압력 센서 등
Ethernet 통신 배경
Ethernet 통신 적용 배경
- 컴퓨터 네트워크 기술의 하나로, 일반적인 LAN에서 가장 많이 사용
- 지원하는 통신 속도는 10mbps ~ 10Gbps
- 자동차 전자 제어기의 증가, 카메라, 진단, 안전 보조장치, 엔터테인먼트등 대용량 데이터 발생으로 인해 고속 통신이 필요하게 되었다.
- 산업룡 Ethernet은 차량에 적용하기에 조건, 신뢰성, 와이어링등의 조건이 맞지 않아, 직접적인 사용은 어려웠다
- 차량용 Ethernet 개발을 위해 OPEN 단체가 설립되었고, 2016년 부터 국제 표준 단체 IEEE에서 표준화를 진행중
적용 현황
- 2008 BMW가 진단 및 리프로그래밍 용도로 IT 에서 사용하던 (2/4-pari) Ethernet 기술 개발
- 2011 Oepn(One pair Ehter net)이 설립되어 2ㄷ가닥 통신선으로 가능한 Ethernet 기술 개발
- 2015년 부터 Surround View, 엔터테인먼트, 주차 지원등 ADAS와 엔터테인먼트 시스템 연결하는 Ethernet 통신 적용 제어기들이 증가
- IEEE 표준 단체에서 IEEE Standard 100 Base-T1이라는 이름 하에 표준화가 진행되고 있음
- 제어용 통신으로 확대 적용하기 위해 최근에는 신뢰성 높은 Ehternet 통신이 개발중임
Ethernet 통신 개요
Ethernet 통신 개요
- 전이중화 (Full duplex)는 송신과 수신 과정이 동시에 동작할 수 있는 연결 방식을 의미하며 1:1 통신에 사용한다.
- Ethernet 스위치는 MAC 주소를 기반으로 패킷이 전달되도록 하는 기능을 갖춘 장치로, 계층적 네트워크 구성이 가능하고, 연결된 장치의 추가, 제거가 용이하다.
-Ethernet 패킷에는 송신 측 MAC 주소와 수신 측 MAC 주소를 포함하고 있어 스위치를 통해 계층적 구조로 연결된 제어기에 데이터를 전달 할 수 있다.
차량용 Ehternet 통신 개요
- 차량용의 경우 one-pair UTP(Unshield Twisted Pari) 통신선을 사용하는 구조로 새롭게 설계되었다.
- 차량 내에 제어 데이터와 멀티미디어 데이터 처리를 위한 모든 요구 사항을 만족하고, 다양한 종류의 데이터를 실시간으로 전달하고 동기화하기 위해 별도의 통신 프로토콜을 개발
- 차량에서는 옵션 사항이나, 차량 variant등의 이류로 제어기의 추가 및 제거가 용이해야 하므로 서비스에 따라 패킷 전달 기능을 다르게 적용할 수 있는 기술들도 적용되었다.
- Ehternet 백본은 차량 내 주요 제어기를 Ethernet으로 연결하고 나머지 관련 제어기를 서브 네트워크로 구성하는 네트워크 구조를 의미한다.
Ethernet AVB 통신 개요
Ehernet AVB 통신 개념
- AVB(Ethernet Audio Video Brdiging)은 IEEE 802.1을 따르는 기술 표준
- 오디오, 비디오등의 멀티미디어 스트림 데이터의 품질을 보장하며 동시에 원활하게 전달하기 위해 고안하였다.
- 멀티미디어 데이터가 전송될 때, 오디오 데이터와 비디오 데이터는 서로의 싱크가 lip-sync처럼 잘 동기화될 필요가 있다.
- 주변 Ethernet Bridge의 클럭을 동기화 기술로 전송 지연을 최소화시켜 스트리밍 서비스를 가능하게 한다.
차량용 Ehernet AVB 통신 개념
- ECU와 인포테인먼트 기능의 수요 증가로 차량용 Ethernect에 대한 연구를 진행해왔음
- OBD(On Board Diagnotics), ADAS시스템이 탑재되면서 대용량, 고속 실시간 데이터 처리가 중요해짐
- AVNU 단체에서 자동차 환경에 맞는 요구 사항을 기존 산업용 Ethernet AVB 통신에 반영한 Automotive Ethernet AVB 통신에 대한 표준화를 진행하게 되었음.
- 자동차의 경우 안전과 밀접한 데이터도 네트워크에서 처리되기 때문에 데이터의안정성과 실시간성이 매우 중요
- 차량용 Ehternet AVB 스택은 AVB 지원 하드웨어와 AVB 지원 소프트웨어 프레임워크 부분으로 구성
Ehternet AVB 통신 표준
Ehternet AVB 통신 표준 사양 구성
- 802. 1Qav : AV 프레이 전송 기능, Traffic Shaper 기능
- 802. 1as : AV 장치 간 시간 동기화
- 802. 1Qat : 스트림 대역 예약
- IEEE 1722 : AV 스트림 전송 프레임 구성
- 802. 1ba : AVB 브리지, 단말 요구 사항 정의
Ehternet AVB 표준 사양 스펙
- IEEE 802.Qav는 AV 프레임 전송 기능 및 남는 대역에서의 일반 프레임 전송 기능을 지원할 수 있도록 Credit 개념을 사용하는 Traffic Shaper라는 것을 지원함
- IEEE 802.1AS는 AV 장치 간 시간 동기화 지원, 시간 동기화란 각 장치 간의 시간의 차이를 보상하면서 동작 Clock을 서로 맞추는 작업으로 장치 간 실시간성 보장에 중요한 요소
- IEEE 802.1Qat는 대역폭 할당 기법을 명세해 놓은 표준으로 Talker와 Listener 사이의 스위치들이 주어진 시간적 요구 사항을 만족할 수 있도록 대역폭을 제공할 수 있는지 확인하고 이를 확보하는 과정임
- IEEE 1722는 AVB 데이터의 전송 프로토콜을 명시해 놓은 것으로 메시지 프레임 포맷을 정의함
추가적으로 IEEE 802/1ba는 AVB 장치나 브릿지의 요구사항을 정의 (Recovery 시간, 최대 사이즈, 오차범위, 전달 시간 등)
Ethernet TSN 통신 개요
Ethernet TSN 통신 배경
- 안전과 민감한 제어 시스템에서는 약간의 통신 지연이 큰 사고 발생으로 이어질 수 있기에, 정교한 통신 처리와 시스템 동기화가 요구됨
- TSN(Time-Sensitive Network)란 초저지연 인프라 기술의 하나로서, Ehernet 계층의 시간 제어 네트워크의 하나이다.
- TSN은 AVB에서 확장된 네트워크로서, 제어 데이터를 실시간성을 보장하며 안전하게 전송 보장하는 기능이 추가되고 있다.
Ethernet TSN 통신 표준
- TSN은 IEEE 802.1(국제 전기 전자 기술자 협회, 네트워크 기술 표준 담당) 내 TSN 태스크 그룹에서 개발중
- 기존 Ethernet AVB 통신을 TSN으로 이름을 변경하여 멀티미디어 뿐 아니라 제어 데이터까지 처리하도록 기능 개선을 추진 중이다.
- 표준 사양
802.1Qv : Time-Critical data 우선처리
802.1Qbu : Message Preemption 처리
802.1Qch : 전송 스케줄 관리
802.1CB : 중복(Redundant) 프레임 처리
802.1AS : 시간 동기화 처리
728x90
'자동차' 카테고리의 다른 글
| 자동차 공조시스템 (0) | 2024.08.09 |
|---|---|
| 자동차 통신 및 네트워크 (2) (7) | 2024.07.24 |
| V-Model (0) | 2024.07.17 |
| A-SPICE SYS Group Process (0) | 2024.07.04 |
| AUTOSAR Platform (0) | 2024.05.31 |