728x90
TCP/IP 통신
TCP/IP의 개념
- TCP/IP 스택은 네트워크를 통해 서로 정보를 공유하는 표준 프로토콜의 집합을 의미한다.
- IP는 인터넷 프로토콜로서, 인터넷 환경에서 IP 주소 체계에 의해 정보가 전달될 수 있도록 하는 규약
- TCP는 여러 데이터를 순차적으로 전송할 때 송-수신이 제대로 이루어졌는지 확인하는 과정을 포함한 전송 제어 규약
- TCP/IP 스택은 물리 계층의 통신 방식과 상관없이 상위 애플리케이션끼리 데이터를 송-수신할 때 필요한 부가 정보를 담을 수 있는 표현법과 방식을 정의한 상의 프로토콜이다.
TCP/IP 스택 구조
- TCP/IP 스택은 응용, 전송, 네트워크, 테이터 링크, 물리 계층 등으로 나뉘어 구성
- 응용 계층에는 실제 전달하고자 하는 데이터만 필요
- 전송 계층에서는 TCP 혹은 UDP 형태로 저장하고 전달하는 방식에 대한 내용을 정의
- 네트워크 계층은 IP 주소를 포함하여, 송-수신할 대상에 대한 정보를 정의
- 데이터 링크 계층은 데이터 전송에 사용한 통신 방식을 정의
- 물리 계층은 실제적인 유선이나 무선으로 전달되는 물리적인 신호의 모양을 정의한다.
진단 통신 배경
진단 통신 도입 배경
- 배출 가스 제어 장치의 고장과 MisFire 등 배기 가스 증가 원인이 되는 현상을 막기 위해 차량의 상태를확인할 수 있는 인터페이스가 필요
- 차량의 안전과 관련된 고장 정보를 운전자에게 전달할 필요가 있어 MIL(Malfunction Indicating Lamp)로 경고하여 배출 가스 제어 장치의 고장, 열화에 의한 배출 가스 증가를 억제 하기위한 목적으로 도입
- 1988년 이후 캘리포니아주에서 판매되는 모든 자동차에 대해 OBD 탑재가 의무화되면서 전 세계의 자동차에 점차적으로 진단 통신과 OBD가 적용
진단 통신 법규 및 표준
- OBD는 진단 통신을 이용하여 차량을 진달할 수 있도록 차랴 내에 정해진 커넥터 모양과 통신 방식, 필수 진단 정보 등의 내용을 담고 있는 법규이다.
- DLC(Diagnostic Link Connector) 진단 커넥터는 차량 내에 별다른 도구 없이 접근 가능한 곳에 설치되어야 한다.
- 차량 내 전자 제어 장치와 외부 진단기 간의 통신 규약을 정의하기 위해 ISO 국제 표준에서 UDS(Unified Diagnostic Services) 통합 진단 서비스 내용을 ISO 14229로 정의하고 있음
- ISO 15765-3 에서는 CAN 통신을 이용한 진단 프로토콜을 정의하고 있음
- 진단 통신은 저자 제어 장치 진단, 제어기 리프로그래밍, 원격 제어등 다양한 서비스를 지원한다.
진단 통신 개요
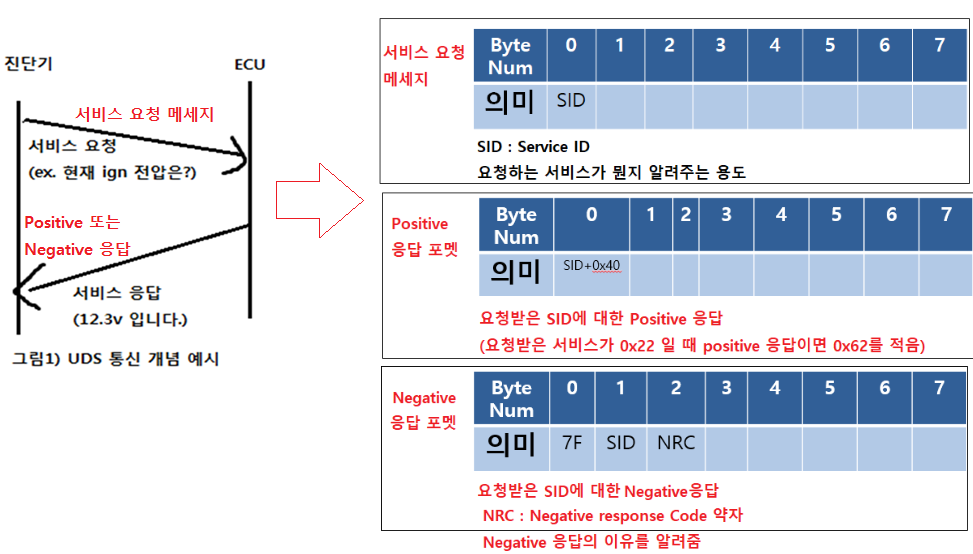
UDS 통신 개념
- UDS는 통합 진단 서비스 프로토콜로 다양한 진단 서비스를 지원하기 위해 진단 절차 및 데이터 표현법 등을 정의한 통신 규약
- OBD-II는 제한된 법적인 서비스 정보만 제공하지만, UDS는 제조사와 기술자 간의 진단 서비스를 구현하기 위한 내용까지 포함하고 있는 규약을 정의하고 있음
- UDS클러이언트는 진단 서비스를 요청하는 측으로 일반적으로 진단기, 테스터기가 해당된다
- UDS 서버는 진단 서비스 요청을 수신하는 측으로 일반적으로 차량 내 전자 제어기가 해당되며, 진단 서비스 요청에 대한 응답을 제공해야 한다.
- UDS는 물리적인 통신 방식에 상관없이 두 장치 간의 진단 서비스를 표현하는 방법, 진단 서비스 절차 등의 내용을 담고 있는 상위 프로토콜이다.
UDS 통신 서비스
- UDS 통신 서비스는 진단기와 제어기 간의 진단 통신을 통해 할 수 있는 서비스를 정의
- 대표적으로 네트워크 계층의 프로토콜 제어, 제어기 내부 데이터 취득, 고장 코드 기록, 백업, 원격 강제 구동, 소프트웨어 업데이트 등이 있음
- 최신 차량에는 UDS 외에도 차량 내 전자 제어기들의 상태 모니터링 및 점검을 위해 외부에서 테스터라고 하는 컴퓨터(클라이언트)를 차량의 Bus 시스템에 연결하여 개별 제어기의 고장 메모리를 확인하거나, 새로운 소프트웨어로 업데이트 하는 등 양산 이후 제ㅐ어기 유지, 보수 모니터링 관리 용도로 널리 활용되고 있음.
게이트웨이 시스템 개요
게이트웨이 시스템 하드웨어 구조
- 게이트웨이는 다양한 통신 방식으로 구성된 이종 네트워크 간의 정보 교환이 이루어지도록 데이터를 변환하는 장치이다.
- 차량용 게이트웨이 장치는 CAN, LIN, Ethernet 같은 이종 통신 네트워크 간의 정보교환, 내부 네트워크 관리, 외부 인터페이스 통제, 진단 모니터링, 데이터 미러링, 로링 등의 기능을 지닌다.
- 게이트웨이 장치의 하드웨어는 Controller, Transceiver등으로 구성
- Controller는 Main microcontroller IC에 내장된 경우가 많으며 CAN,LIN Controller등이 있음
게이트웨이 시스템 소프트웨어 구조
- 게이트웨이 소프트웨어는 일반적으로 차량용 전자 제어기의 표준 소프트웨어 플랫폼으로 알려진 AUTOSAR 소프트웨어 플랫폼을 기반으로 개발하는 경우가 많다.
- AUTOSAR에는 통신 및 네트워크 제어를 위한 다양한 프로토콜 스택이 구현되어 있음
COM : 통신 메시지 중 Signal 단위 처리
SM : 통신 상태(State) 관리
NM : 네트워크 관리
PDUR : PDU 라우터 (전달)
- 이종 네트워크 간의 메시지를 전달하는 방법에는 Frame, PDU, signal Routing이 존재
- Frame : 도일 네트워크 간
- PDU : 이종 네트워크 간. 하나의 메시지를 호환가능한 단위로 분할하여 전달
- Signal : 필요한 signal 부분만을 재조합하여 전송
ITS 개요
ITS(Intelligent Transport systems) 개념
- ITS는 교통수단 및 교통 시설에 전자,제어 및 통신 등 첨단 기술을 접목하여 교통 정보 및 서비스를 제공하고 이를활용함으로써 교통 체계의 운영 및 관리를 과학화 - 자동화하고, 교통의 효율성과 안정성을 향상시키는 교통 체계
- 버스 정류장의 버스 도착 안내 시스템, 교통량에 따라 자동으로 차량 신호가 바뀌는 시스템, 내비게이션의 실시간 교통 정보(TPEG), 하이패스 등이 ITS에 해당
- 카메라를 통해 교통사고,차량고장,도로 파손등의 돌발 상황을 실시간으로 파악, 대응하여 피해를 줄이고, 교통소통에 미치는 영향을 최소화하여 목적지까지의 소요시간, 우회 경로, 주차 정보 등을 제공, 빠른 길로 안내하고 교통량을 분산하는 등 효율적인 교통 운영을 위해 도입
C-ITS 개념
- C(Cooperative)-ITS는 V2X통신을 활용하여 서로 데이터를 공유하고, 능동적인 돌발 상황 대응 및 예방이 가능한 교통 안전중심의 차세대 ITS를 의미한다.
- C-ITS는 V2X 통신 기반의 정보를 공유하여 실시간 정보의 수집과 제공, 연계 서비스의 제공 등 다양한 서비스로 확장이 가능하다.
- CAV(Connected Autonomous Vehicle)는 자율주행차에 V2X 통신을 기반으로 연결성을 제공함으로써 인프라 통신이 하나의 센서와 서비스로 연결되는 자동차를 의미한다.
ITS 현황
C-ITS 국내 개발 현황
- C-ITS 인프라 구축을 위해 필요한 구성 요소
1) 도로 인프라 지원 시스템 : RSU(Road Side Unit), 중계기, CCTV
2) C-ITS 센터 : 도로 인프라의 정보를 기반으로 교통 시스템을 운영하는 데이터 통제 센터
3) ITS 차량 단말기 : OBU(On-board Unit), 차량 내에 탑재되어 RSU나 다른 차량과 통신할 수 있는 단말기 - 국내의 경우 2014년부터 C-ITS 인프라 구축을 위한 시범 사업과 실증 사업들이 진행중임.
- 서비스 개발, 검증, 인프라 구축, 단말기 배포, 표준, 인증 절차 사양 개발등을 진행중임
주요 서비스
- 원활한 도로교통 주행, 충돌예방 등
- 위치 기반 교통 정보 제공 서비스
- 원격 자동 결제 서비스
- 교통 위험 정보 안내 서비스
- 사고 위험 정보 안내 서비스
- V2V, V2I등의 통신을 기반으로 정보 공유를 통해 자율주행차의 센서 오차, 돌발상황 대체 기능의 한계를 극복할 수 있도록 다양한 서비스 개발 중
V2X 통신 개념
V2X 통신의 정의
- V2X는 통신으로 연결된 미래의 자동차를 위한 기반 기술이다.
- 차량이 무선망을 통해 다른 차량 및 도로 등 인프라가 구축된 사물과 정보를 교환할 수 있도록 지원하는 기술을 의미한다
- 완전히 자동화된 교통 인프라를 가능하게할 핵심 기술
V2X 통신 개념
- V2V : 차량간의 통신. 돌발상황을 뒤차에게 전달
- V2I : 차량과 인프라 간에 무선으로 정보를 주고 받는 기술. 교통상황이나 돌발 상황을 안내받을 수 있어 사고 예방 가능
- V2D : 차량과 디바이스 기기 간에 무선으로 정보를 주고 받는 기술. 모바일 기기를 가진 개인 간에 정보를 교환해 차량과 보행자가 가까워지면 양쪽 모두에게 경고음을 발생시켜 사고 방지
V2X 통신 표준화 현황
V2X 통신 특징
- 자동차 외부 통신은 V2X를 구현하기 위해 다양한 통신 방식이 사용됨
- V2V/V2I : DSRC/WAVE, CALM, LTE, 5G, Wi-Fi 등
- V2D : BLE, USB, UWB 등
- V2G : PLC, CAN, J2847 등
- 다수의 차량이 전파 통신을 이용하여 차량과 차량 간의 통신 또는 차량과 인프라 간의 통신을 자율적인 네트워크로 연결하는 기술은 VANET(Vehicular Adhoc Networks) 이라 한다.
- 네트워크를 형성하는 각 노드가 고속으로 이동하여 네트워크의 연결 시간이 짧아 연결 상태가 불안정한 상태로 유지된다는 점으로 기존의 통신환경과 매우 다름
V2X 통신 표준화
- V2V/V2I 통신 기술은 VANET 기술로서 Wi-FI 기술을 기반으로 자동차와 인프라의 환경에 맞추어 표준화를진행하여 802.1p를 새롭게 개발
- DSRC(Dedicated Short Range Comuunication)은 ITS를 위한 단거리 무선 통신 기술로 전자요금 징수, 무정차 기반 자동 요금 지불 서비스, 교통정보 서비스 등을 위해 개발된 통신 기술
- WAVE (Wireless Access in Vehicular Environment) 통신 프로토콜 : 802.11p 기반의 V2X 기능 구현을 위한 통신 메시지의 전송 규칙 등을 표준화 한 것
- IEEE 1609.2 : 통신 상 보안 서비스 규정 정의
- IEEE 1609.3 : 네트워킹 서비스 정의 (TCP/IP를 포함한 메시지 프로토콜 스택 정의)
- IEEE 1609.4 : 멀티 채널 동작 정의 (MAC 계층에서의 복수 채널 전환 정의)
- IEEE 1609.12 : 식별자 할당 정의 (WAVE 식별자 할당)
WAVE 통신 개요
DSRC 통신 개념
- DSRC는 근거리 전용 통시능로 차량과 노변 기지국 간에 사용되는 근거리 통신이다.
- 20m 이하의 노변-차량 간 양방향 근거리 통신으로, 일 대 다수의 통신기능, 고속 전송기능(1mbps), 값싸고 단순한 변조 기술을 사용하는 것이 특징이다
- DSRC는 요금 징수, 교통량 수집과 정보를 제공하는 네트워크 통신 기술로 기존에 ITS에 가장 많이 활용하였음.
- 사물 인터넷 환경과 스마트카의 개발에 따라 교통상황을 실시간으로 인지하여 교통 사고를 미연에 방지하고 교통 흐름을 원활하게 조정할 수 있는 통신 기술의 개발이 요구에 맞는 V2X의 개념으로 확장하기에는 부족하여 DSRC에서 WAVE통신이 확장 개발중
WAVE 통신 개념
- V2X룰 를 위항 대역 할당, 기지국과 단말기 간의 서비스 정보를 주고 받기 위해 양방향 통신을 제안하면서 개발 시작
- 공공 안전, C-ITS 서비스를 위한 V2X 차량 네트워킹 기술 WAVE는 IEEE 802.11a/g 무선 와이파이 기술 차량 환경에 맞도록 개량한 802.1p MAC/PHY 기술을 기반으로 개발
- 무선 통신 장치들이 혼선 없이 자신의 무선 신호를 전달하려면 다른 신호와 겹치지 않는 자신의 주파수 영역인 주파수 대역폭을 가져야 하는데 WAVE 통신은 5.9Hz 영역대를 사용
- Wave 통신으 1개의 제어 체널과 6개의 서비스로 나누어 통신
- 제어 체널은 모든 기지국이 동일한 체널을 사용하여 모두가 알아야 하는 메시지를 전송
- 서비스 체널은 각 기지국마다 독립된 체널을 할당, 미리정의된 서비스 제공
WAVE 통신 표준 (SAE J2735)
SAE J2735 표준 구성
- SAE J2735(DSRC Message Set Dictionary)는 WAVE 통신을 통해 애플리케이션 간 전달되는 메시지 규격을 정의함
- 유럽 V2X 표준 단체 ETSi에서 ITS/V2X 메시지 정의를 다음 표준에서 제시하고 있음
- ETSI EN 302 637-2, ETSI EN 302 637-3 - 표준 구성 (Data Dictionary, Message Set, Data Frame, Data Element)
SAE J2735 표준 Message Set
- DSRC SAE j2735에는 총 16종류의 메시지 세트가 정의되어 있으며 계속 업데이트 중
- 주요 메시지 종류
- BSM (Basic Safety Message) : 기본 안전 메시지
- EVA (Emergency Vehicle Announcement) : 응급 차량 접근 메시지
- RSA (Road Side Alert) : 인프라에서 차량으로 보내는 알림 메시지
- SPAT (Signal Phase and Timing) : 교통 신호 등 정보 메시지
C-V2X 통신 개요
C-V2X 통신 기술의 정의
- LTE/5G 모바일 네트워크 통신 기술 기반의 V2X 통신 기술로 단거리 DSRC/WAVE 통신과 구분된다
- C-V2X는 일반적인 휴대전화와 달리 2종류의 전송 모드를 가진다.
indirect : 일반적인 통신 모드로 중계기를 통해 다른 기기와 연결. V2N에 활용가능
direct : 중계기 없이 모바일 기기간 직접 연결되는 방식. V2I, V2V, V2P와 같은 서비스에 사용가능 - 5GAA는 5G기반의 c-V2X를 표준화를 진행하는 단체
- ETSI(유럽 통신 표준 협회)에서 유럽 지역의 C-V2X표준화를 진행중
C-V2X 와 V2X와의 차이
- 성능면에서 C-V2X가 우위에 있다고 볼수 있자만, 용화나 인프라 측면에서는 V2X가 많은 진전을 보여 사용화 단계까지 진행되어 있는 상태
- C-V2X의 LTE-V2X나 5G-V2X의 표준화는 아직 진행 중이며 상용화 까지는 많은 시간이 필요한 상황
- C-V2X의 경우 LTE/5G망을 이용하기에 기존의 인프라를 활용할 수 있어 중복투자가 없다는 장점 존대
- 기존 WAVE 통신의 상위 애플리케이션 프로토콜을 그대로 활용할 가능성이 높아 통신 매체만 변경되는 차원에서 기술 전환이 이루어질 가능성도 높은 상황이다.
전기차 충전 시스템 개요
전기차 충전 시스템 개념
- 전기차는 전기 에너지를 베터리에 저장하고, 베터리로 부터 구동력을 얻어 움직이는 자동차
- 전기차와 전력망을 연결해 주는 기반 시설이 전기차 충전 인프라이며, 베터리를 충전하기 위한 전력의 대부분은 직접 전력망에 연결하여 공급
- 전기차 충전 인프라는 Smart Power Grid(한전), Charging Station, Interface 구조를 가진다.
충전 시스템 구조
- 전기차의 내부는 크게 OBC, 베터리 시스템, EPCU(통합 전력 제어 장치, 자동차 내부 전원 공급), 감속기, 구동 모터로 구성되며 충전과 관련 있는 시스템은 OBC와 베터리 시스템이다.
- OBC(on Board Charger)는 고전압 베터리의 충전을 위해 외부 AC 전원을 DC 전원으로 변환시키는 장치. 완속 충전이와의 연결을 담당한다.
- 베터리 시스템은 베터리 자체와, 베터리 제어를 위한 BMS(Battery Management System)으로 구성. BMS는 베터리의 각 셀과 내구성과 성능이 최적이 되도록 충-방전 기능을 담당
- Charging Station은 전력망으로 부터 AC 전압을 차량 충전에 맞는 DC 전압으로 변환하여 공급하는 역할. 또한 전력망과 연결되어 과금. 충전량 등의 정보를 교환하는 통신이 이루어지며 PLC, CAN 통신 등이 이에 활용된다.
전기차 유선 충전 통신 개념
전기차 유선 충전 통신 개념
- 전기차 충전 방식은 SAE J1772(IEC 62196)에 따르면 AC Level 1/2, DC level 1/2로 나뉜다 .
- AC LV1 : 가정에서 표준으로 사용되는 120V 고류 전압을 이용하여 충전하는 방식으로 최대 전달 전력은 2kW를 사용
- AC lv2 : 단일 혹은 삼중 위상 교류 전압 240V를 이용하여 충전하는 방식으로 LV1에 비해 충전 속도가 빠르다
- DC LV1,2: 직류 고전압 50 ~1000V를 이용하여 매우 높은 전류 (Level 1: 80A, Level2: 400A)로 충전 진행
전기차 유선 통신 표준
- 전기차 유선 충전 통신에는 다양한 종류가 존재하며, 각 국가별로 다른 표준을 사용하고 있어 SAE, IEC, ISO등의 표준 단체에서 표준안을 마련하기 위해 준비 중이다.
- 충전 통신은 대표적으로 Control Pilot, CHAdeMO, PLE 등이 존재
- Control Pilot : 충전 파워 조절 제어 신호에 6단계의 전압 레벨로 나눠진 PWM 신호를 사용하여 충전기와 배터리 간의 제어에 이용
- CHAdeMO : CAN 통신을 이용하여 데이터 기반 충전 프로세스를 제어하는 방식
- PLC : PLC 통신을 이용하여 데이터 기반 충전 프로세스 및 인프라 연계 서비스를 제공하는 방식
728x90
'자동차' 카테고리의 다른 글
| HILS 검증 (0) | 2024.08.19 |
|---|---|
| 자동차 공조시스템 (0) | 2024.08.09 |
| 자동차 통신 및 네트워크 (1) (5) | 2024.07.23 |
| V-Model (0) | 2024.07.17 |
| A-SPICE SYS Group Process (0) | 2024.07.04 |